系列篇:
认识PID(1)| 何为自动控制?
认识PID(2)| 何为反馈?
认识PID(3)| 为什么需要PID算法?
认识PID(4)| 为什么控制回路中过多的比例增益会使其不稳定?
积分作用也称为“自动重置”。它会自动“重置”增益偏置,直到偏差为零。
以开车为例,你的车轮以固定的转向角行驶,但由于强烈的侧风,你一直向前行驶。但你想横向移动到你的目标位置。你是怎么做的?
你做的正是PID控制器中的积分项所做的:你开始增加你的转向角,然后一直增加它,直到你开始侧向移动。
这就是积分作用用来克服比例作用的不足之处。比例作用只是“比例增益”乘以偏差。如果偏差保持不变,但你还没有达到目标设定值,你就会被卡住。这称为余差,这是纯P控制的问题。
积分作用的增加克服了这一缺陷。如果设定值(SP)和过程变量(PV)之间存在偏差;积分动作将开始增加控制器输出,直到事情再次开始移动。
数学上,它“通过偏差积分增加控制器输出”。这是什么意思?信号的积分是信号从开始计数到停止计数的所有瞬时值的总和。
将其转化为控制系统,这意味着积分动作将简单地开始累加所有偏差值,如果偏差为非零,则产生斜坡信号。当然,为了确保你的偏差足够大,你需要非常仔细地调整“I积分时间”。
所以现在我们已经很好地控制了汽车的转向。我们有一个比例项,它能立刻查看我们所在的位置和我们的目标位置之间的瞬时偏差,并提供给我们一个好的初始转向角。
当我们接近目标位置时,比例作用会随着偏差的减小而减小转向角。
与比例作用并行的“积分作用”开始“偏置转向角”,只要存在位置偏差,就不断增加转向角。
当没有干扰时,积分作用只会使转向角变陡一点,通过减少到达目的地所需的时间来提高“控制器性能”。
然而,我们的“积分作用”产生重大影响的地方是我们遇到干扰的地方,例如侧风。在这种情况下,我们的“积分作用”继续增加我们的转向角,直到我们有足够的角度来“突破”侧风,继续到达我们的目的地。
下图显示了PI控制器中的算法是如何计算的:
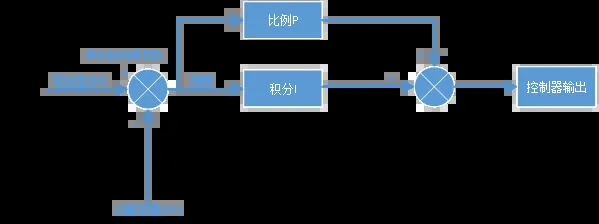
如果上图中比例框的输出为20%,积分作用越大,它越快得到这个20%的值。也就是说,到达那里所需的时间将更少,因此积分时间将更小。
换句话说,积分时间越小,积分作用越大。