系列篇:
认识PID(1)|何为自动控制
认识PID(2)| 何为反馈?
在控制器里最常用的算法就是PID。在过程控制中,95%以上的控制回路是PID型的,大多数回路实际上是PI控制。为什么需要PID算法?以及为什么/如何控制过程?
我们将用在大风天的高速公路上变道进行类比。
我们是驾驶员,因此是改变汽车位置过程的控制者。
这是我们以前使用的方框图,标签被更改为代表有风高速公路控制回路上的汽车。
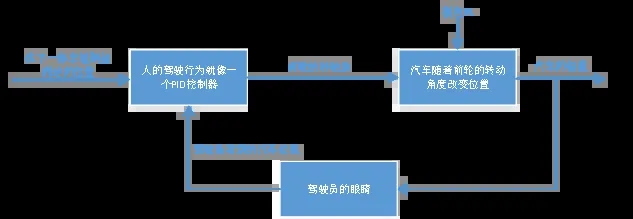
注意关闭反馈回路是多么重要。如果我们移除反馈回路,我们将处于“开环控制”状态,并且必须闭上眼睛控制汽车的位置!幸运的是,我们处于“闭环控制”之下——用眼睛进行位置反馈。
控制器同时接收过程变量(PV)和设定值(SP)信号,然后通过控制算法计算控制器输出。该控制器输出被发送到执行机构,执行机构移动以实际控制过程。
我们在这里感兴趣的是控制算法的实际功能,即它对设定值(SP)和实测过程变量(PV)信号进行1、2或3次计算。这些被称为“控制模式”的计算包括:
比例(P)
积分(I)
微分(D)
这是PID控制器的简化框图:
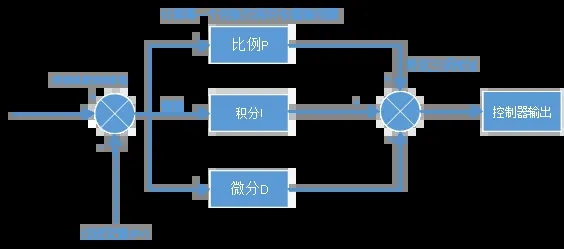
它的操作非常简单。从设定值(SP)中减去过程变量(PV)以创建偏差。该偏差简单地乘以一个、两个或所有计算出的P、I和D作用(取决于打开的动作)。然后将生成的“偏差×控制动作”相加并发送到控制器输出。
这三种模式以不同的组合使用:
P–有时使用
PI–最常用的
PID–有时使用
PD–很少用,但可用于控制伺服电机。